In this demo, we implement a Xampling-based hardware prototype that allows sampling of radar signals at rates much lower than Nyquist. Our Xampling method uses an analog to digital converter (ADC) which performs analog prefiltering of the signal before taking point-wise samples. Thus, Xampling breaks the traditional link between sampling rate and range resolution. We further show how Xampling allows for dynamic adaptation of both transmitted and received signals, allowing for higher SNR without any compromise and paving the way to cognitive radar (CR). Last, we show how Xampling can break the link between time-on-target and Doppler resolution by sending non-uniformly spaced pulses in a certain direction and the complementary set of pulses in another.
We demonstrate by real-time analog experiments that our system is able to maintain good detection capabilities, while sampling radar signals that require sampling at a rate of about 30MHz at a total rate of 1Mhz. The demo is based on a hardware prototype developed at the Technion and was first demonstrated at NI Week, August 2012 and also at Radarcon, April 2013, ICASSP 2014 (best demo award) and Globecom 2015. Details can be found in the papers cited below.
Compressed Radar
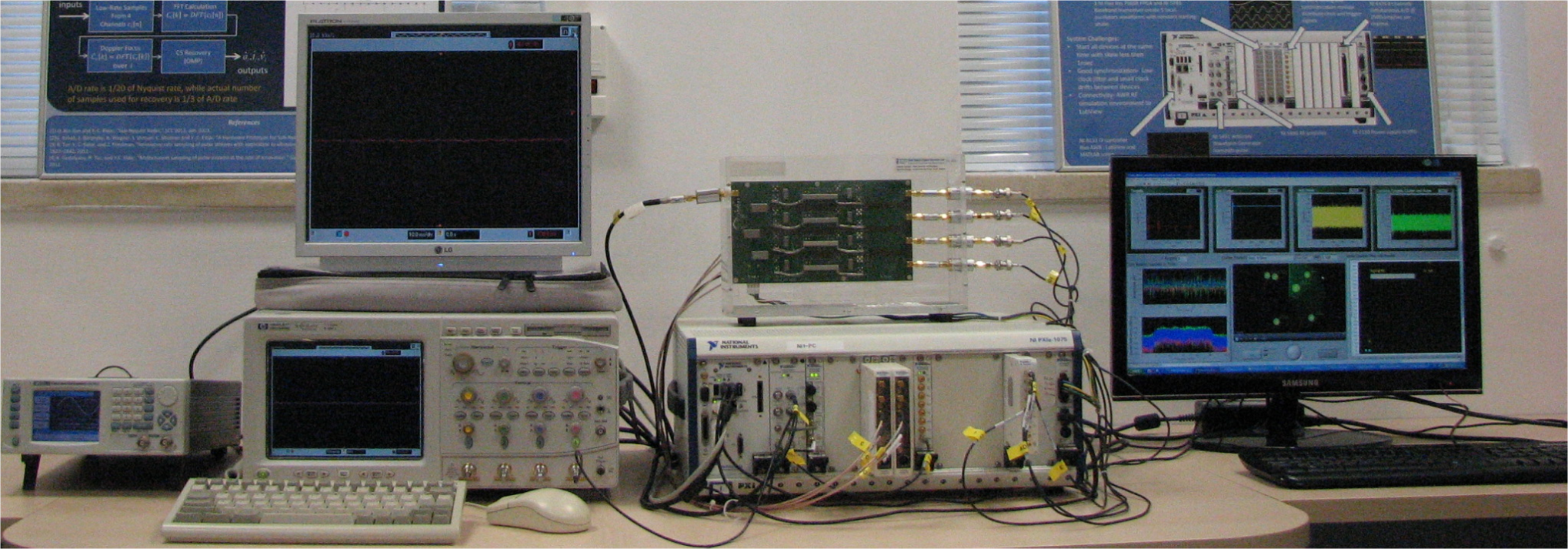
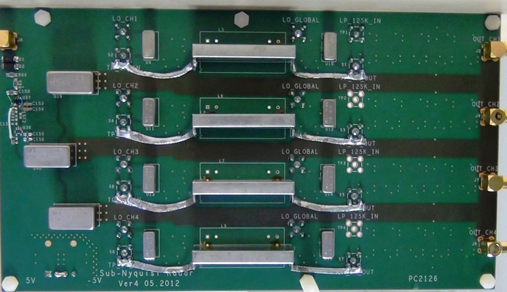
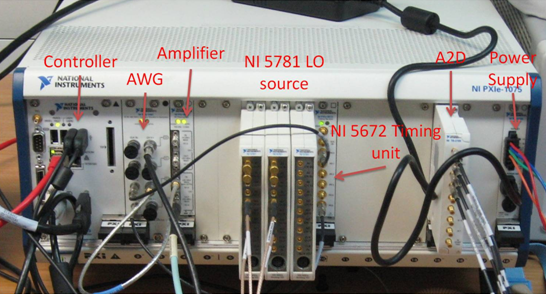
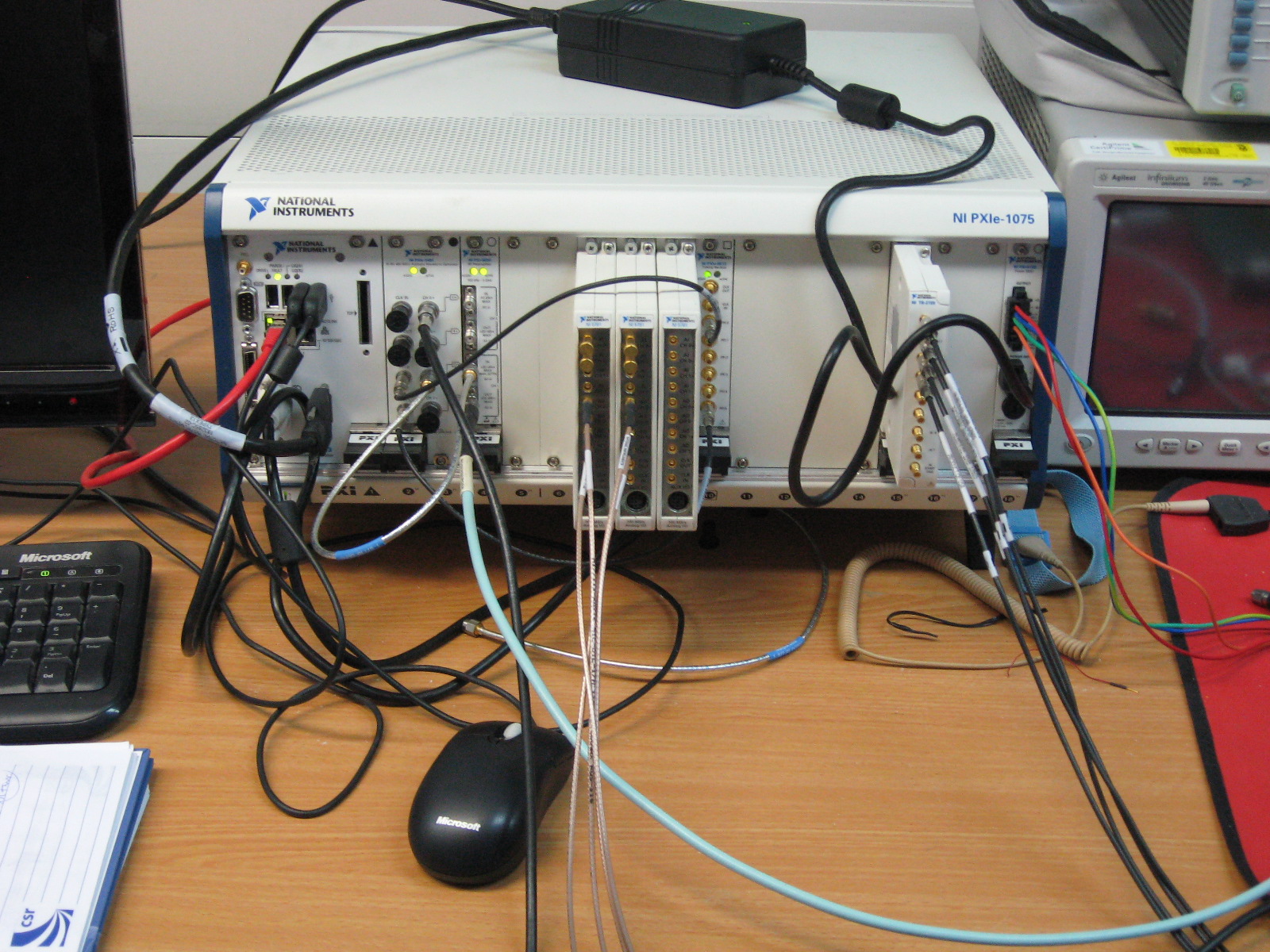
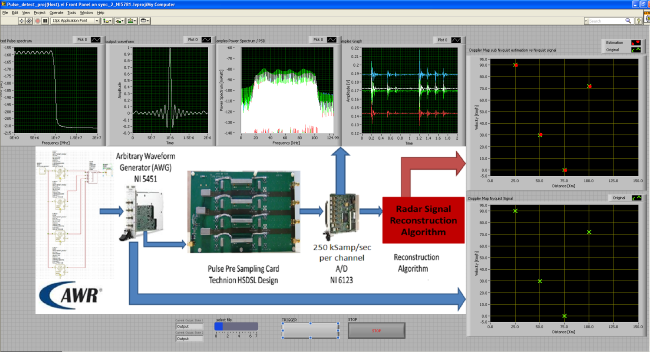
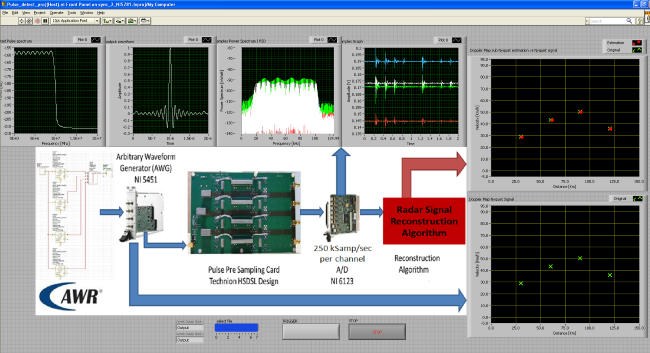
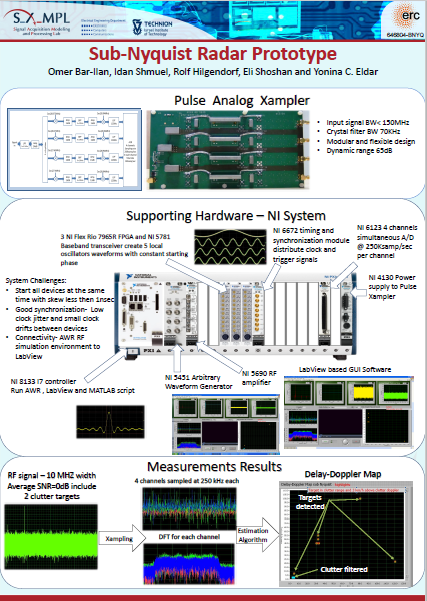
The basic prototype is composed of an analog front-end (see Figure 1),
fed by a synthetized RF signal using National Instruments (NI) hardware and followed by digital delay-Doppler map recovery.
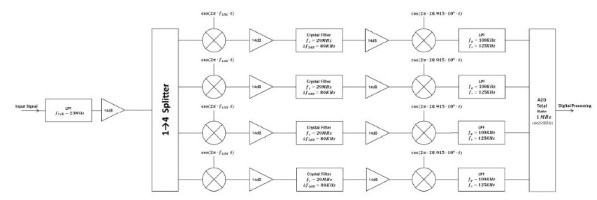
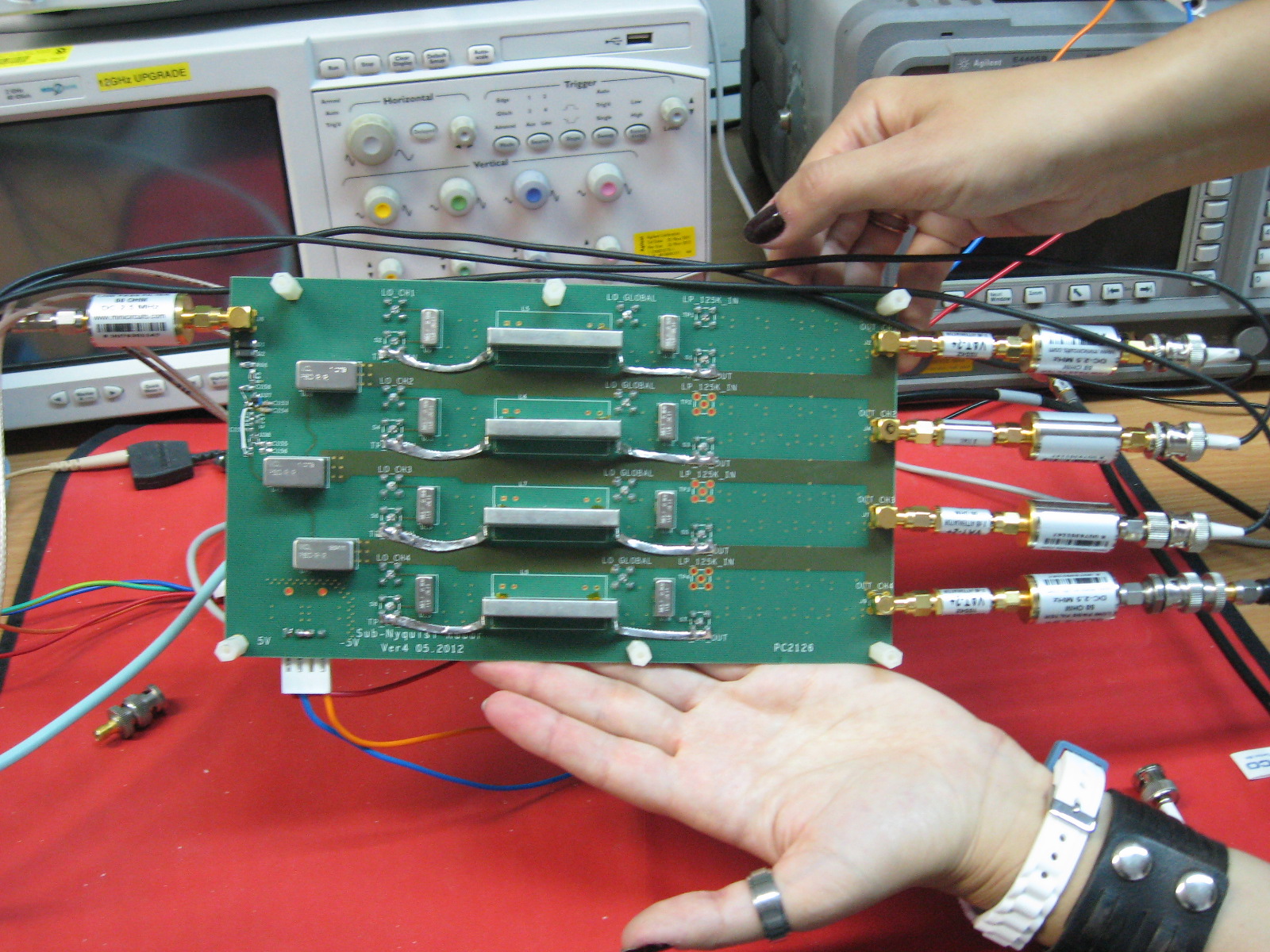
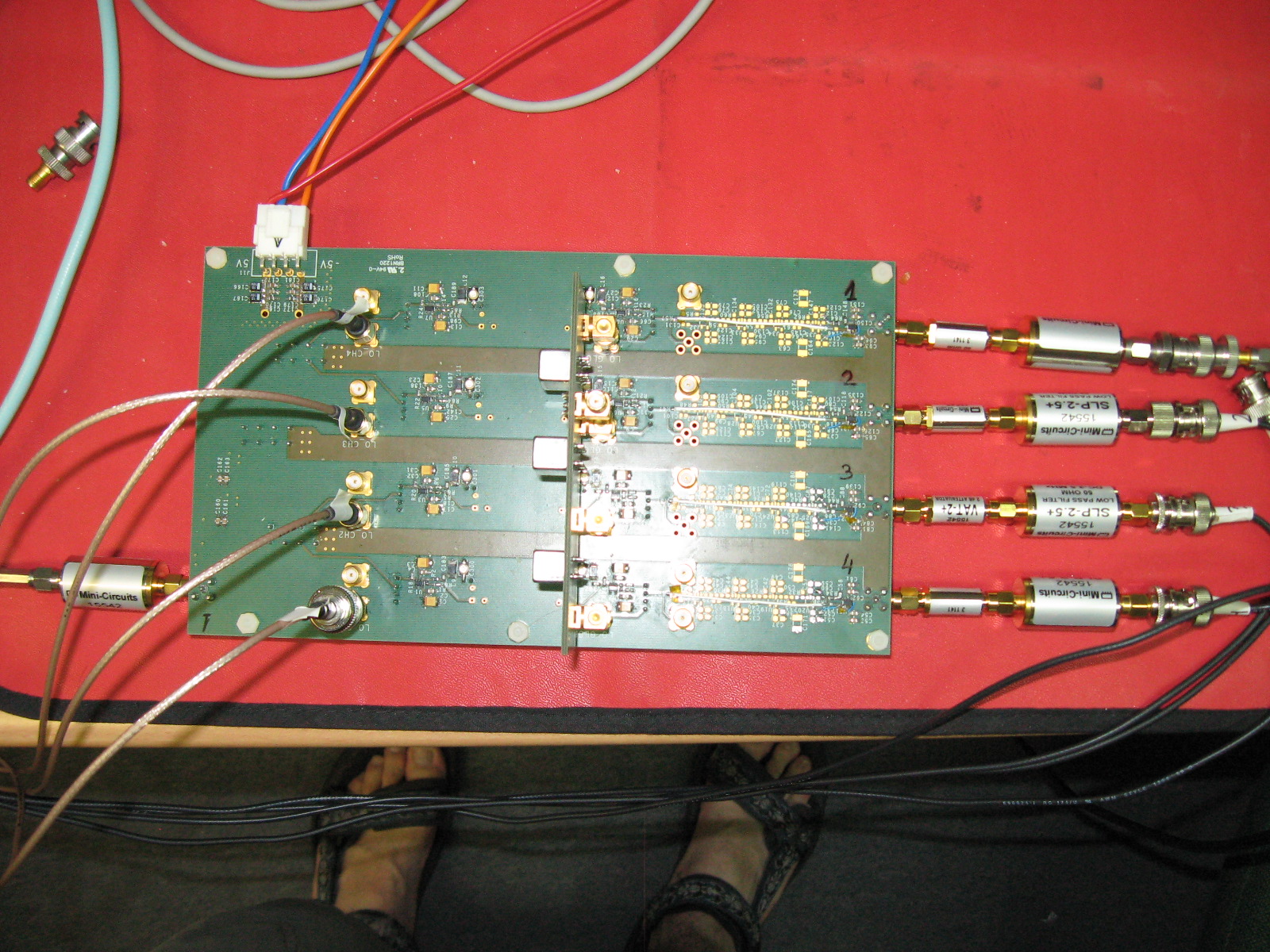
We transmit 50 pulses with bandwidth 20 MHz. At the receiver, a multiple bandpass sampling approach was chosen,
where four groups of consecutive Fourier coefficient subsets are selected. In particular, the system is composed of four
analog channels comprising a low pass filter (LPF), followed by sampling at twice its stopband frequency. In each channel,
the desired band is filtered, demodulated to baseband and sampled at its low Nyquist rate. Each channel samples a band with
bandwidth 80 KHz at 250 KHz, resulting in an overall sampling rate of 1 MHz, namely 5% of the Nyquist rate.
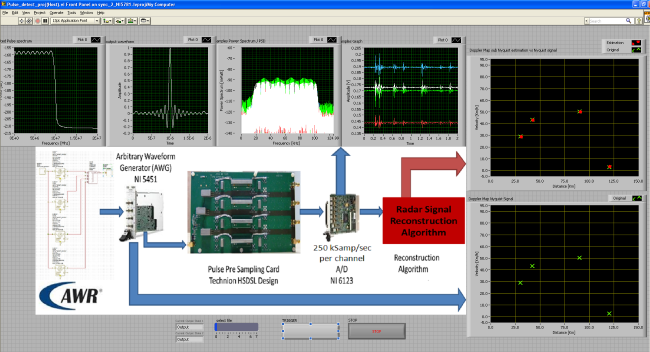
The digital reconstruction algorithm, performed at a low rate,
allows recovery of the unknown delays and Doppler frequencies of the targets. A block diagram of the system is shown in Figure 2.
Figure 1 - Prototype Block Diagram
Figure 2 - Analog front-end board
We conducted several experiments in order to test the accuracy of our system under various conditions.
In all experiments our demo system reconstructed the delay-Doppler map.
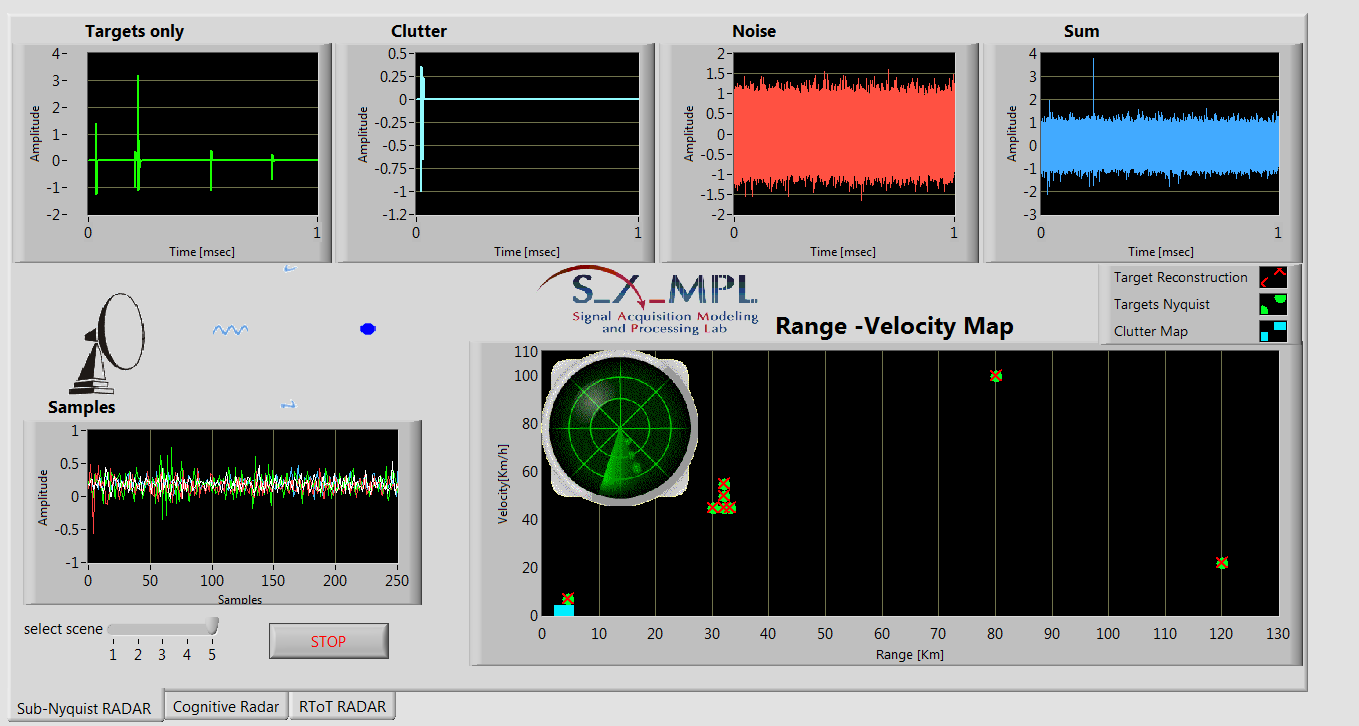
Experiment 1 - In this experiment, we created 7 targets with different delays and different Doppler frequencies, including close delays and Dopplers. Clutter is present as well and identified by the system.
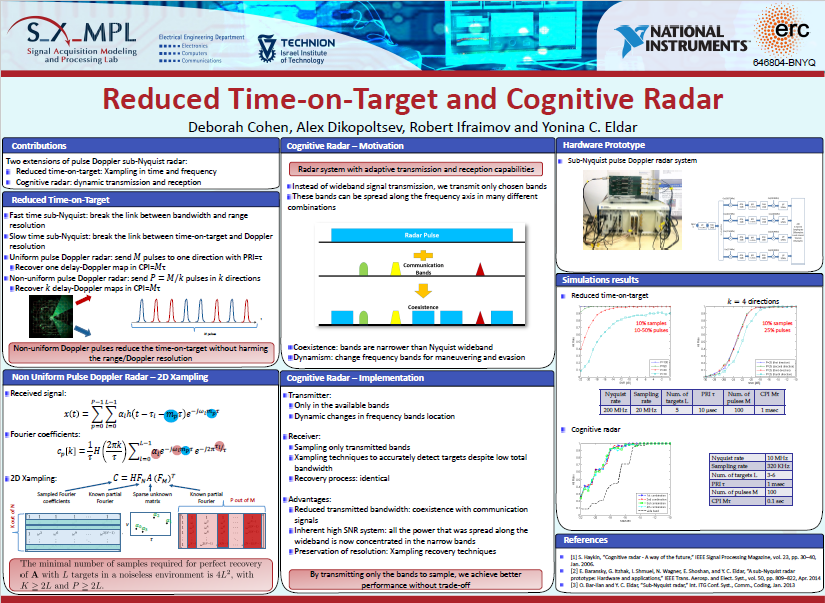
In order to increase the flexibility and responsiveness of our sub-Nyquist pulse radar prototype, we consider the CR approach. CR is defined as a radar system with adaptive transmission and reception capabilities, namely both the transmitter and receiver are able to dynamically adjust to the environment conditions. Here, we extend the sub-Nyquist pulse Doppler radar prototype, presented above, to allow for transmission and reception of several narrow frequency bands, rather than a wideband spectrum. To comply with CR requirements, the bands support vary with time dynamically adapting to the environment. Moreover, such a system allows us to disguise the transmitted signal or cope with an overloaded spectrum by using a smaller portion of it.
In the sub-Nyquist setup described above, the transmitter broadcasts a wideband signal, which reflects on the targets and propagates back to the receiver. The received signal is then filtered before sampling, so that only the content of a few narrow bands is sampled and processed. For broadband frequency occupation and power saving, we propose to transmit only the narrow frequency bands that are to be sampled. This will not affect any aspect of the processing since the received signal is preserved in the band of interest. To comply with CR requirements, the bands locations and bandwidths vary with time depending on the environment. This approach leads to three main advantages. First, the compressed sensing (CS) reconstruction allows for better resolution. Second, since we only use the received bands to transmit, the SNR is improved as well. Last, this technique allows for a dynamic form of the transmitted signal spectrum.
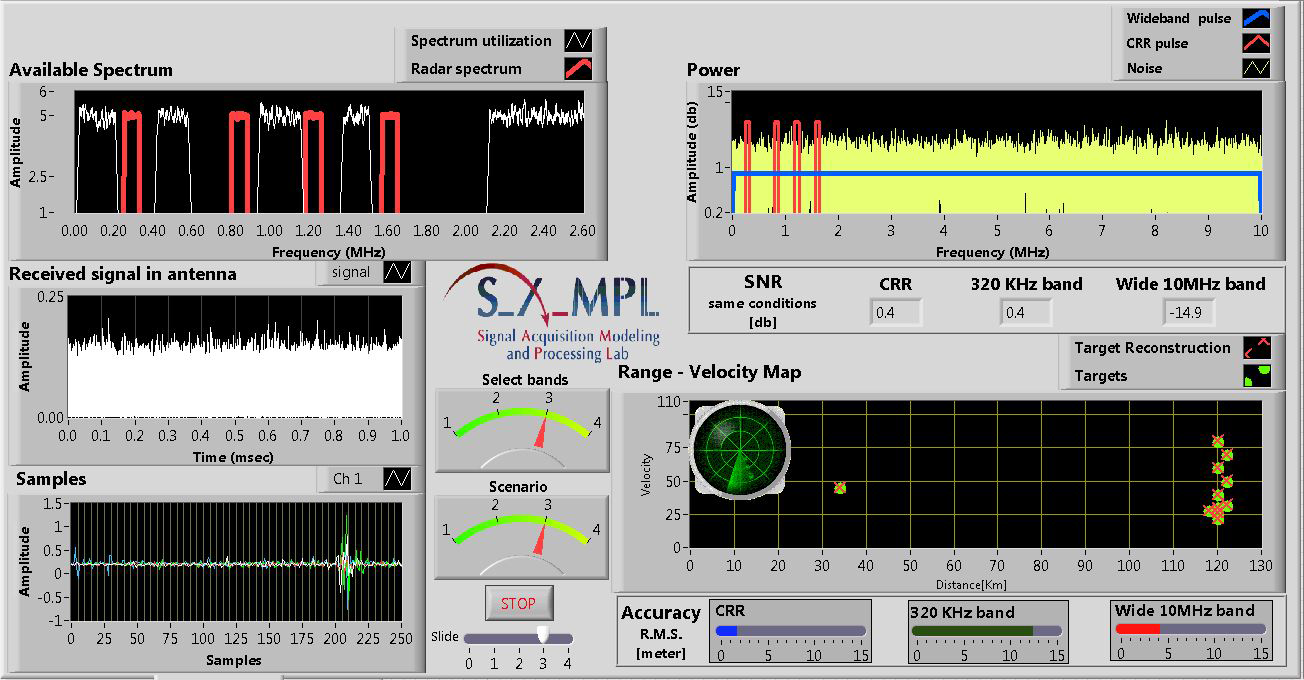
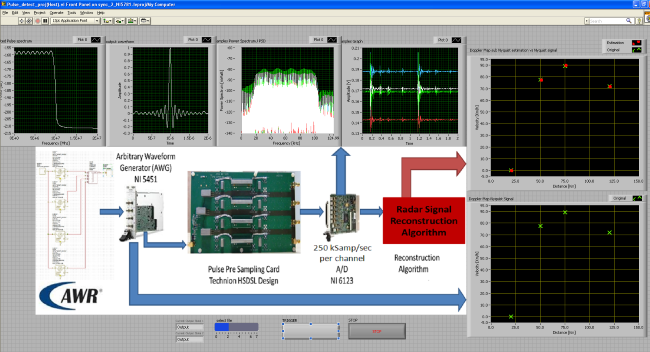
Experiment 2 - We use the same receiver as described above and modify only the transmission. We transmit 50 pulses over 4 bands with bandwidth 80 KHz each. Figure 4 shows the GUI of our cognitive radar prototype system. The top left illustrates the coexistence of our system and other communication applications; the radar transmitting bands are in red and the occupied spectrum appears in white. The top right graph demonstrates the gain in power; the wideband radar spectrum is shown in blue, our CR in red and the noise in yellow in a logarithmic scale. The bottom left windows show the analog received signal and the low rate samples in the time domain. The clutter appears in close range as can be seen in the samples window.
The true and recovered range-velocity maps are shown at the bottom right. All targets are perfectly recovered. Below the map, the range recovery accuracy is shown for 3 scenarios: from left to right, CR in blue (2.5m), 4 adjacent bands with same bandwidth (12.5m) and wideband (4m). The poor resolution of the 4 adjacent bands scenario comes from its small aperture. Our CR system with non-adjacent bands yields better resolution than the traditional wideband scenario.
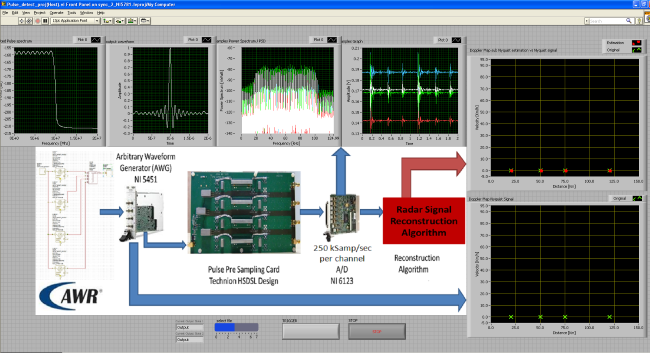
When considering a directional antenna, in order to be able to distinguish between targets located in different directions, the time-on-target, namely the time needed for discovering a target in a specific direction, is the coherent processing interval (CPI), which is equal to the product of the number of transmitted pulses P and the pulse repetition interval (PRI). The resolution in Doppler frequency is governed by P, which leads to a trade-off between large P for high resolution and small P for short time-on-target. We propose to send a subset of the pulses non-uniformly and exploit the periods of time where no pulse is sent to a specific direction to send a pulse to another one. This way, we can deal with several directions during the same CPI, reducing the overall time-on-target.
Reduced time-on-target requires the ability to send pulses to different directions and reconstruct several delay-Doppler maps during the same CPI, which led to software changes with respect to the basic prototype. The same receiver is assumed to receive the reflected pulses coming from all the considered directions (at different and known PRIs). Therefore, the same analog front-end is used here.
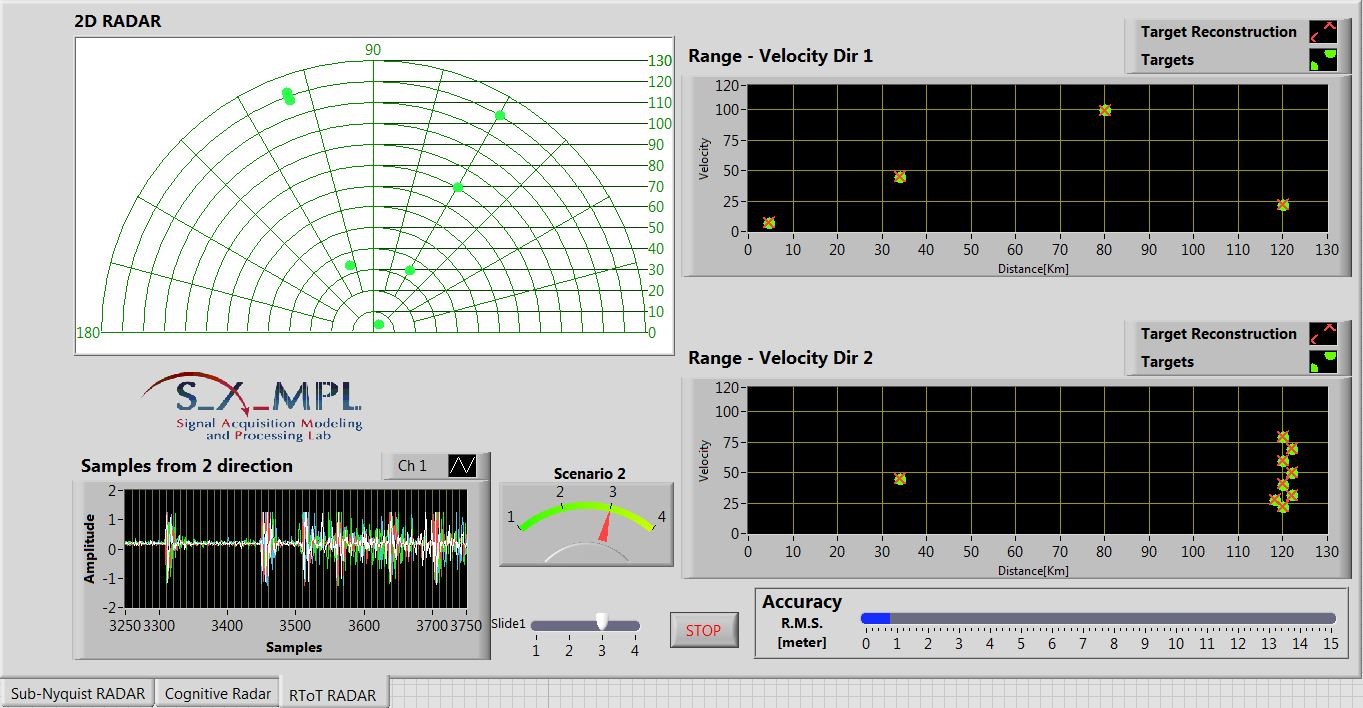
Experiment 3 - In this experiment, half of the pulses chosen at random, namely 25 pulses, are sent in one direction, while the other half is sent in a second direction. Two delay-Doppler maps can then be simultaneously recovered as shown in Figure 5.