Meshing natural outdoors scenes from sparse-and-noisy point clouds
Computer Graphics in 3-Dimensions
Project Description:
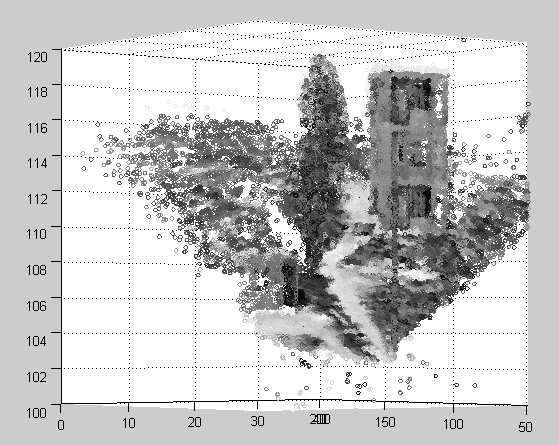
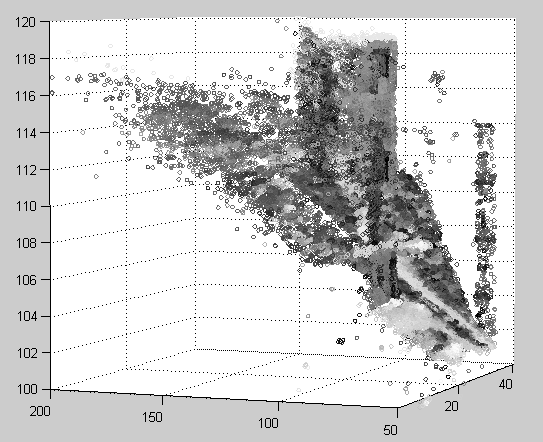
A point cloud is an unorganized set of 3D points, extracted from a scene by an active/passive scan. The meshing challenge is known as reconstructing the original model by covering the points in the point cloud with polygons (triangles, called faces) optimally. In contrast to previous works ("structure from motion"), we would like to focus on point clouds extracted from a video scan of natural outdoors scenes, for a known camera trajectory. These point clouds are inherently sparse and noisy, and our goal is to reconstruct a mesh efficiently and accurately to fit the original scene, while minimizing the visible artifacts caused by outliers.
Project Goal:
In this project we will develop and implement an algorithm to reconstruct a mesh of a natural outdoors scene, out of a sparse-and-noisy point cloud.