Yoav Y. Schechner: Research


Flat Refractive Geometry
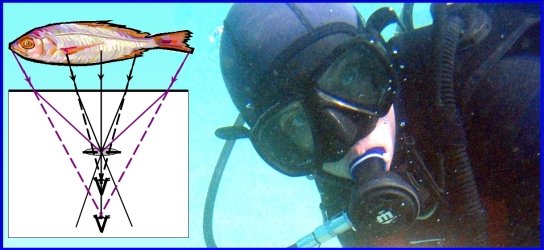
While the study of geometry has mainly concentrated on single-viewpoint (SVP) cameras, there is growing attention to more general non-SVP systems. Here we study an important class of systems that inherently have a non-SVP: a perspective camera imaging through an interface into a medium. Such systems are ubiquitous: they are common when looking into water-based environments. We analyze the common flat-interface class of systems. The study characterizes the locus of the viewpoints (caustic) of this class, and proves that the SVP model is invalid in it. This may explain geometrical errors encountered in prior studies. Our physics-based model is parameterized by the distance of the lens from the medium interface, beside the focal length. The physical parameters are calibrated by a simple approach that can be based on a single-frame. This directly determines the system geometry. The calibration is then used to compensate for modeled system distortion. Based on this model, geometrical measurements of objects are significantly more accurate, than if based on an SVP model. This is demonstrated in real-world experiments. In addition, we examine by simulation the errors expected by using the SVP model. We show that when working at a constant range, the SVP model can be a good approximation.
Publications
- T. Treibitz, Y. Y. Schechner and H. Singh, “Flat refractive geometry,” Proc. IEEE CVPR (2008).
- T. Treibitz, Y. Y. Schechner, C. Kunz and H. Singh, “Flat refractive geometry,” IEEE Trans. Pattern Analysis & Machine Intelligence 34:1, pp. 51-65 (2012).
Presentations
- “Flat Refractive Geometry” (4.7 Mb, PowerPoint)
- The above presentation links to a movie: Occlusions and dis-occlusions caused by water refraction (0.6 Mb, WMV).
Related Research
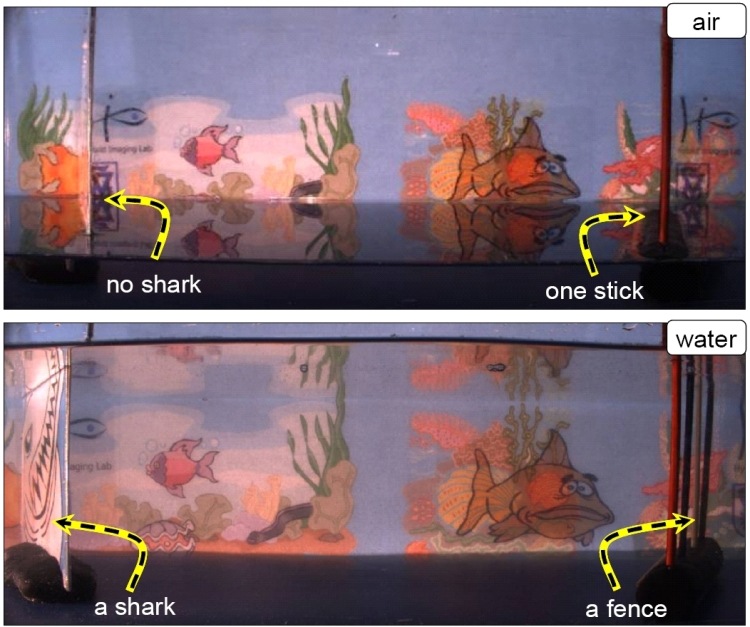 Relative to an airborne environment, occlusions and dis-occlusions occur water.
Click to view.
Relative to an airborne environment, occlusions and dis-occlusions occur water.
Click to view.
 Underwater experiment in a swimming pool, to validate the model.
Underwater experiment in a swimming pool, to validate the model.
 Underwater experiment in the ocean, by scuba diving.
Underwater experiment in the ocean, by scuba diving.