Bayesian
Estimation with Partial Knowledge
Tomer Michaeli and Yonina C. Eldar Overview
A common problem in signal processing is to recover a
signal x from measurements y. Examples include image denoising
and deblurring, speech enhancement and dereverberation, target tracking and
more. Situations of this type are often tackled by employing Bayesian
estimation techniques such as the minimum mean-squared error (MMSE), linear
MMSE (LMMSE) and maximum a posteriori (MAP) estimators. The Bayesian
framework relies on the assumption that x is a random quantity drawn
from some prior probability density function fX(x)
and that the statistical relation between y and x is
characterized by a likelihood function fY|X(y|x). The prior fX(x) can typically be
learned from a set of examples of clean signals. Indeed, a large variety of databases
of all kinds of signals are available online, including facial images,
fingerprints, iris scans and speech signals to name a few. The likelihood fY|X(y|x),
on the other hand, is associated with the degradation mechanism in a specific
application and thus cannot be learned from databases of this sort. One
possibility for obtaining fY|X(y|x)
is to assume a known degradation model such as additive white Gaussian noise.
However, in many situations this assumption is over-simplistic since the
degradation includes complicated effects, which are hard to model and
sometimes not even known. Nonlinear distortion in CCD sensors, unknown blur
and signal dependent noise are a few examples of such phenomena. An
alternative approach for obtaining fY|X(y|x)
is to learn it by collecting a paired set of examples of clean and degraded
signals. Unfortunately, constructing such a database requires a complicated
experimental setting in which our sensor is co-calibrated with some
high-quality sensor, and is therefore usually impractical. Specifically, it
is typically quite simple to obtain a set of clean signals from some a
high-grade sensor (or from an existing database). Similarly, it is also easy
to collect a set of degraded signals taken with our low-grade sensor. But these
two sets are unpaired. How
can we estimate x from y without knowing the degradation model?
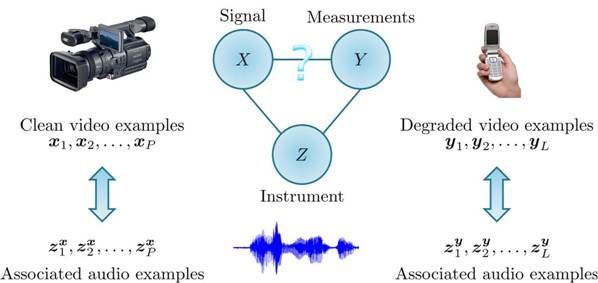
The answer is simple – employ an instrument z. An instrument is a
random quantity whose statistical relations with x and y are
known or can be learned from examples. Consider, for instance, the task of
enhancing a video sequence y of a speaker taken from a low-quality
cellular-phone camera. In this case we can use the audio z as an
instrument. Clearly, we can collect paired examples {yn,zn}
of the noisy video and its associated audio (taken with the
cellular-phone), as well as paired examples {xn,zn}
of clean video sequences with their audio (taken from a high-quality
camcorder), as schematically shown below.
The training sets in this situation can be used to learn
the densities fXZ(x,z) and fYZ(y,z)
but are generally insufficient for determining fY|X(y|x). The difference
between the MSE of an estimator and the lowest possible MSE that could be
achieved if fY|X(y|x) was
known, is called regret. The regret attained by any estimation strategy
depends on the unknown likelihood fY|X(y|x).
Our approach in this work is to design an estimator whose regret for the
worst-case likelihood, which is consistent with our knowledge of fXZ(x,z)
and fYZ(y,z), is minimal. We call this
technique the partial knowledge minimax regret estimator. |
References
T. Michaeli and Y. C. Eldar,
"Hidden
relationships: Bayesian estimation with partial knowledge," to
appear in IEEE Transactions on Signal Processing. T. Michaeli and Y. C. Eldar,
"A
Minimax approach to Bayesian estimation with partial knowledge of the
observation model," IEEE Int. Conf. on Acoustics, Speech and Signal
Processing (ICASSP 2010). |
Software
Download
The minimax regret estimator is implemented in
the Matlab function MinimaxRegretEstimator.m. A simple example of its use on synthetic data can be
found in TestMinimax.m.
In this example, X, Y and Z are jointly Gaussian random
vectors. The minimax regret estimator is supplied with two
unpaired sets of paired realizations {xn,zn}
and {yn,zn}. Its MSE is compared with
that of the MMSE estimator, which knows the true joint distribution of X
and Y. |