Yoav Y. Schechner: Research


Clear Underwater Vision
Underwater imaging is important for scientific research and technology as well as for popular activities, yet it is plagued by poor visibility conditions. We present a computer vision approach that removes degradation effects in underwater vision, under natural illumination. We analyze the physical effects of visibility degradation. The main degradation effect is backscatter (veiling light, path radiance), and it can be associated with partial polarization of light. Thus, we present an algorithm, which inverts the image formation process, thereby recovering good visibility.
The algorithm is based on a couple of images taken through a polarizer at different orientations. As a by-product, a distance map of the scene is also derived. We successfully demonstrated our approach in experiments conducted in the sea. In addition, we analyzed the noise sensitivity of the recovery. The noise is amplified as a function of the object distance. Hence, in a recent paper, we propose a regularization method that adapts to the mentioned distance map. In an additional work, we look at the problem of underwater spatiotemporal illumination patterns (flicker, caustics), which are caused by surface waves. We attenuate these patterns, creating images which appear as if taken under much more stable and uniform illumination.
Publications
- Yoav Y. Schechner and Nir Karpel, “Clear underwater vision,” Proc. IEEE CVPR, Vol. 1, pp. 536-543 (2004).
- Yoav Y. Schechner and Nir Karpel, “Recovering scenes by polarization analysis,” MTS/IEEE OCEANS, pp. 1255-1261 (2004).
- Yoav Y. Schechner and Nir Karpel, “Attenuating natural flicker patterns,” MTS/IEEE OCEANS, pp. 1262-1268 (2004).
- Yoav Y. Schechner and Nir Karpel, “Recovery of underwater visibility and structure by polarization analysis,” IEEE Journal of Oceanic Engineering , Vol. 30 , No. 3 , pp. 570-587 (2005).
- Tali Treibitz and Yoav Y. Schechner, “Instant 3Descatter,” Proc. IEEE CVPR, Vol. 2, pp. 1861-1868 (2006).
- Yoav Y. Schechner and Yuval Averbuch, “Regularized image recovery in scattering media,” to be published in IEEE Trans. Pattern Analysis & Machine Intelligence (2007).
Related Research
 Fig. A - Raw images taken through a polarizer
Fig. A - Raw images taken through a polarizer
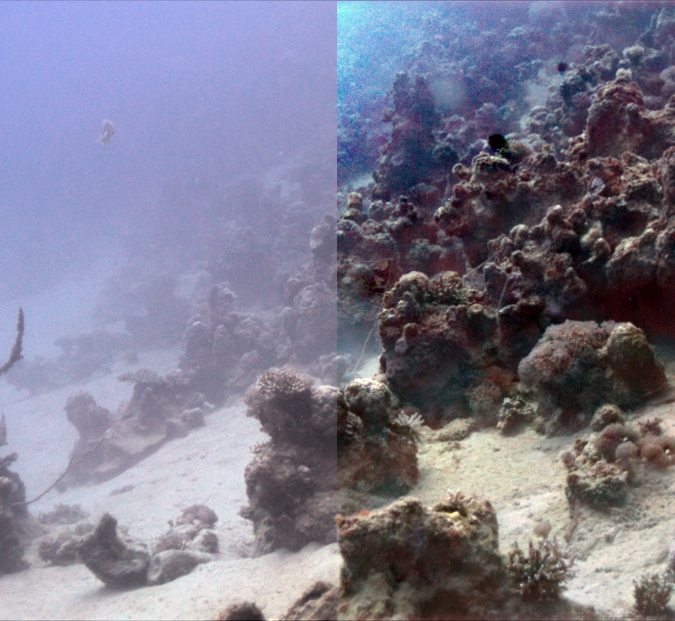 Fig. A - White-balanced results: The recovered image is much clearer, especially at distant objects, than the raw image
Fig. A - White-balanced results: The recovered image is much clearer, especially at distant objects, than the raw image
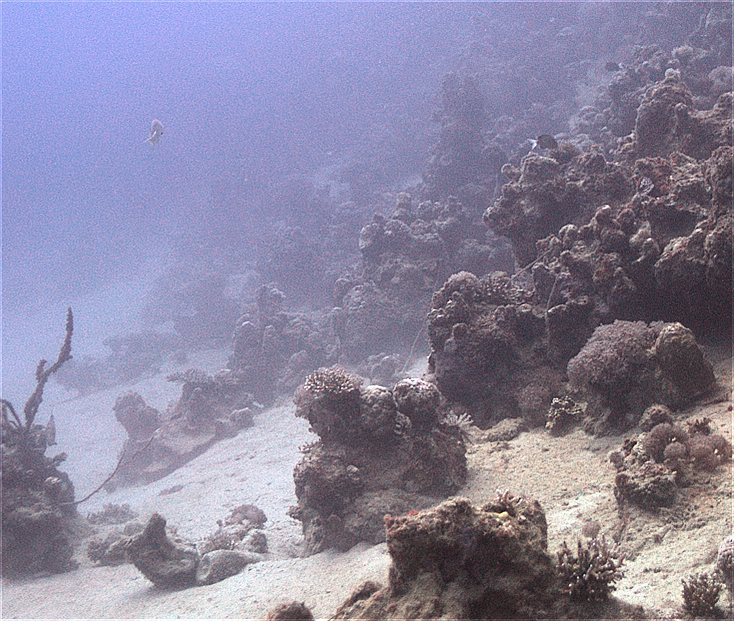
 Fig. B - Raw images
Fig. B - Raw images
 Fig. B - Recovered image
Fig. B - Recovered image
 Fig. E - a 3D rendering of the scene in Fig. A using the estimated 3d recovery of the scene.
Fig. E - a 3D rendering of the scene in Fig. A using the estimated 3d recovery of the scene.
{kind=link}
Fig. C - Attempts to improve the images using unsharp masking and histogram equalization.
{kind=link}
{kind=link}