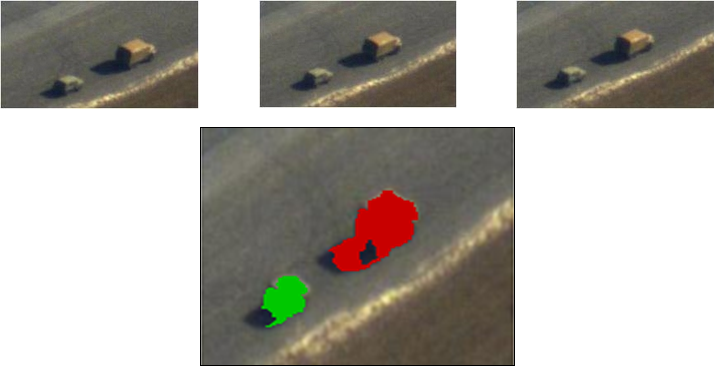
In this project we will perform a segmentation of a rigid object in a video sequence. We will tell the object from its surroundings using its distinct kinematics. For that we will utilize techniques taken from image registration as well as traditional segmentation techniques.