Algorithm
1.interest points detection:
}KLT
algorithm was chosen for this module.
}KLT
uses the spatial intensity gradient of the images to find good match using
the Newton-Raphson
iteration.
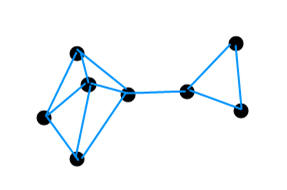
2.Graph creation of kNN
}Interest
points in every frame are processed into graph.
}K
neighbors are the limit of every graph ,
the K nearest neighbors (under the threshold determined) .
3.Edge scoring
Scoring of every edge:

4.Cluster analysis
}After
the scoring phase and low scored edge removal, the interest points can be
divided into several groups using the ratio association.
}A
parameter of maximum groups number is determined preliminary and a special
group for all the new interest points detected in the current frame.
5.Groups unification
}A
case of several groups for 1 object in the image should be dealt in the
module.
}Heuristic
method was used in this step.
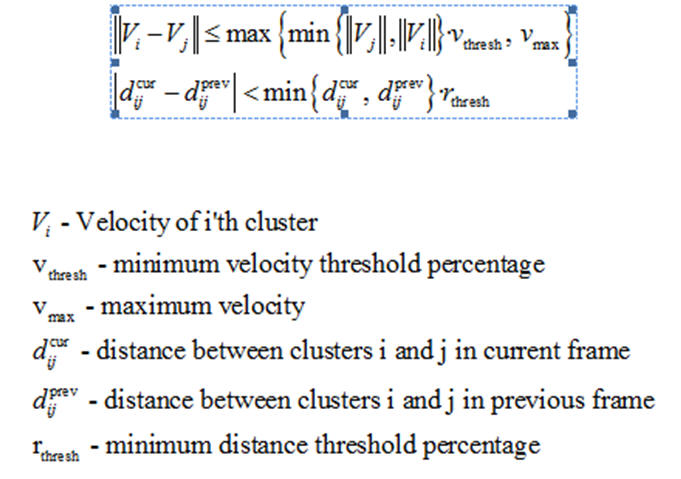
}The
concept for the groups unification is based on the velocity and the position
of the groups .
}A
unification of 2 groups is made if the following condition occurs: