|
 |
|
|
|
HPR - Simple and fast "Hidden" Point Removal operator
|
|
|
|
|
|
| Abstract |
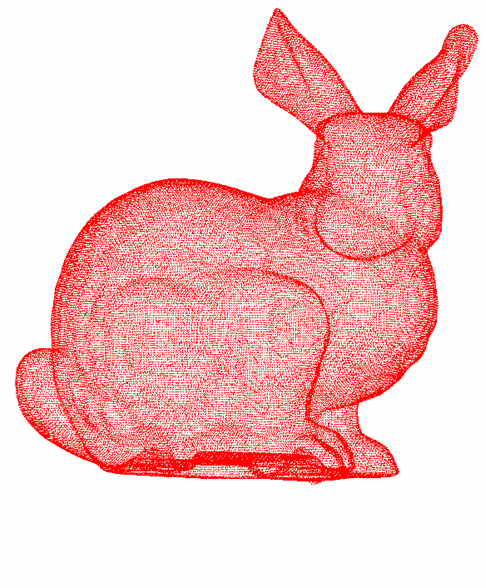
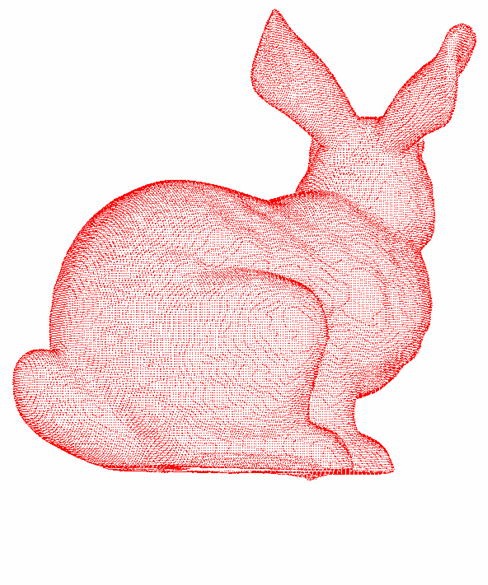
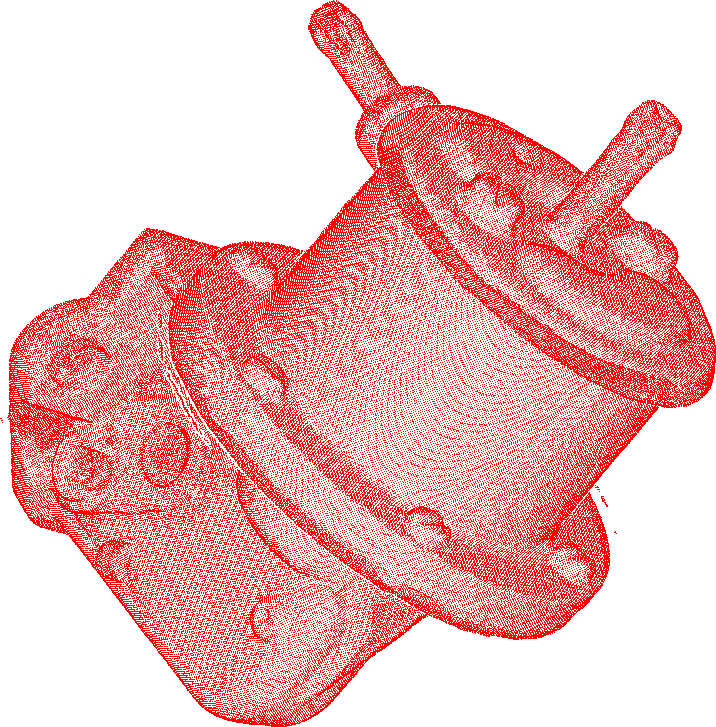
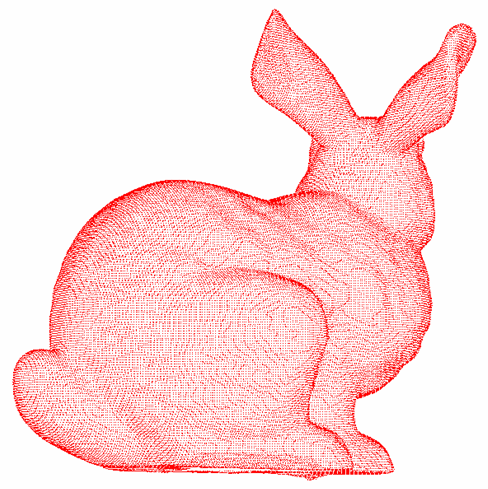
This paper proposes a simple and fast operator, the "Hidden" Point
Removal operator, which determines the visible points in a point
cloud, as viewed from a given viewpoint. Visibility is determined
without reconstructing a surface or estimating normals. It is shown
that extracting the points that reside on the convex hull of a transformed
point cloud, amounts to determining the visible points. This
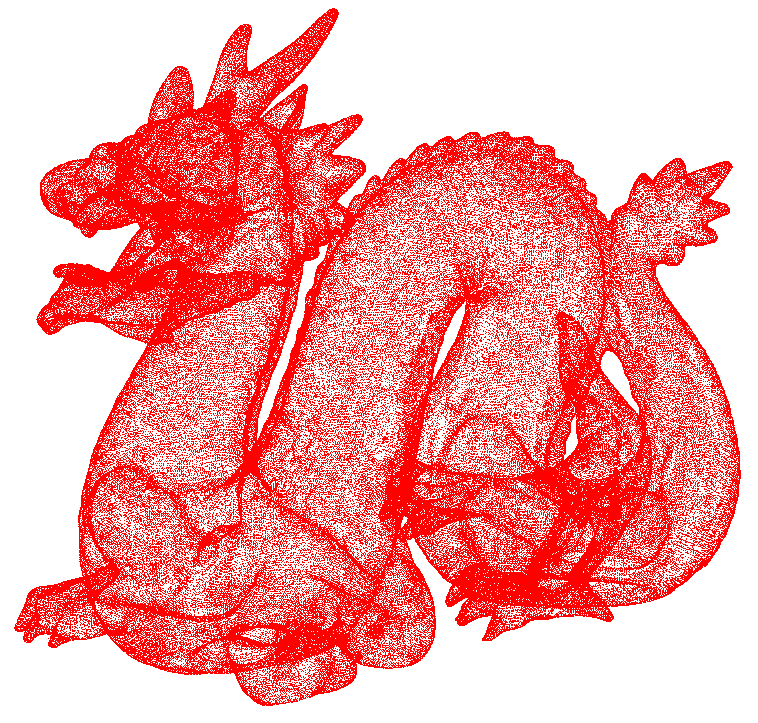
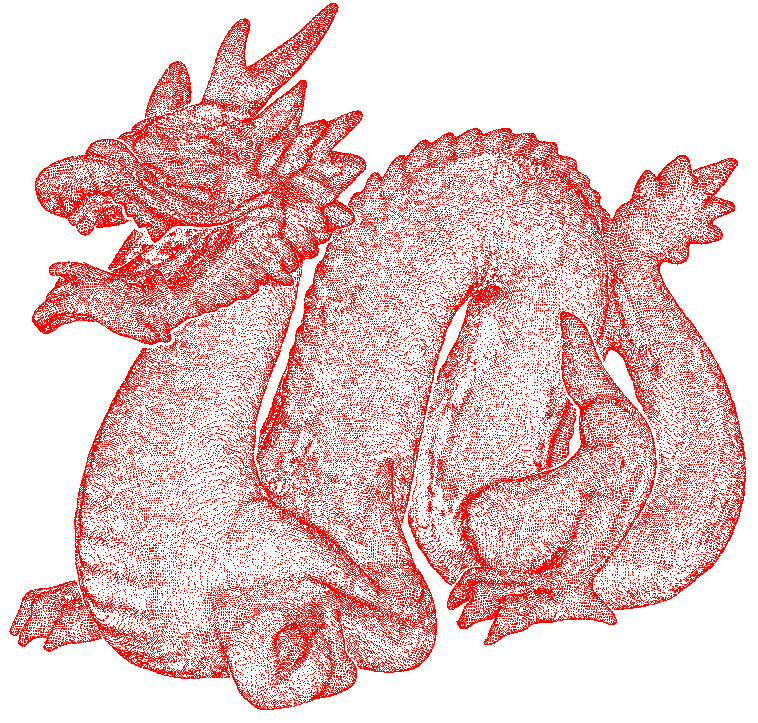
operator is general ? it can be applied to point clouds at various dimensions,
on both sparse and dense point clouds, and on viewpoints
internal as well as external to the cloud. It is demonstrated that the
operator is useful in visualizing point clouds, in view-dependent
reconstruction and in shadow casting.
|
|

|
|
 |
|
 |
|
|
|
| Software |
|
The technology referred to in this project, paper and code (below) is protected by a US patent.
This code is based on the following paper (with some small modifications): Sagi Katz, Ayellet Tal, and Ronen Basri, "Direct Visibility of Point Sets", SIGGRAPH 2007.
Please cite this work if you use our software
The code in this website is for demo purposes only.
Individuals or academic institutes are free to use the saliency maps generated using this version as long as they acknowledge its use.
Commercial licensing is managed by the Technion Industry Liaison Office. Please contact Hovav Gazit for details.
|
|

|
|
|
|
|
|